Cogging Kompensation
Cogging Kompensation wird benutzt, um Cogging Effekten, die im Motor vorhanden sind, durch eine zusätzliche Strom-Vorsteuerung entgegenzuwirken. Das Resultat ist eine Reduktion der Geschwindigkeitswelligkeit, besonders bei kleiner Geschwindigkeit. Geschwindigkeiten größer als 500 U/min führen zu geringer Verbesserung.
Dies ist besonders nützlich bei Applikationen mit hohen Anforderungen an die Synchronizität.
Der AKD verwendet eine Kompensationstabelle, die die Vorsteuerwerte abhängig von der Motorposition speichert. Die Tabelle besteht aus 8192 Einträgen, die gleichmäßig über eine Umdrehung (rotatorische Achsen) oder über einen Bereich verteilt werden, der vom Benutzer definiert werden kann (lineare Achsen).
Der Servoverstärker kann automatisch Cogging Effekte erkennen und eine passende Kompensationstabelle erzeugen.
Steuerung der Cogging Kompensation
Freigeben
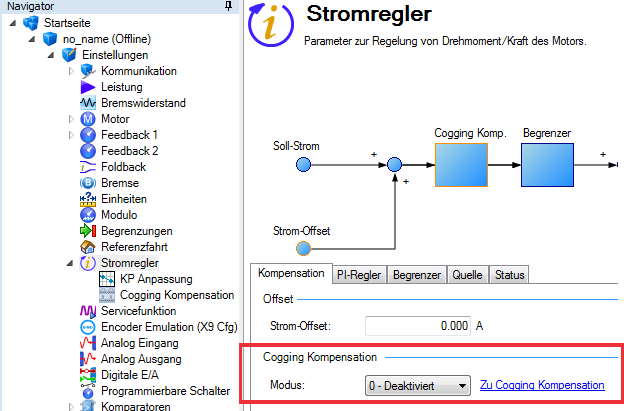
Die Cogging Kompensation kann in der Registerkarte Kompensation im Workbench Stromregler Bildschirm (siehe unten) freigegeben oder gesperrt werden oder mit dem Befehl COGCOMP.EN. Freigeben der Cogging Kompensation oder Booten des Gerätes mit als freigegeben gespeicherter Cogging Kompensation bei Verwendung eines absoluten Feedback ohne Referenzfahrt erzeugt eine Warnung und kein Kompensationswert wird beaufschlagt. Führen Sie entweder eine Referenzfahrt aus oder deaktivieren Sie die Cogging Kompensation um die Warnung zu löschen. Wenn die Warnung durch eine erfolgreiche Referenzierung gelöscht wird, werden die Kompensationswerte erneut beaufschlagt.
-
- Da die Kompensationswerte direkt in einen Stromanteil übersetzt werden, sollten Sie sich immer vergewissern, dass keine unüblich hohen Kompensationswerte in der Tabelle gespeichert sind.
Bildschirmseite Cogging Kompensation
Sie können auf den Bildschirm Cogging Kompensation zugreifen, indem Sie den Stromreglereintrag in der Workbench Gerätetopologie Liste erweitern und Cogging Kompensation auswählen, oder indem Sie dem Link Gehe zu Cogging Kompensation in der Registerkarte Kompensation der Stromregler Bildschirmseite folgen.
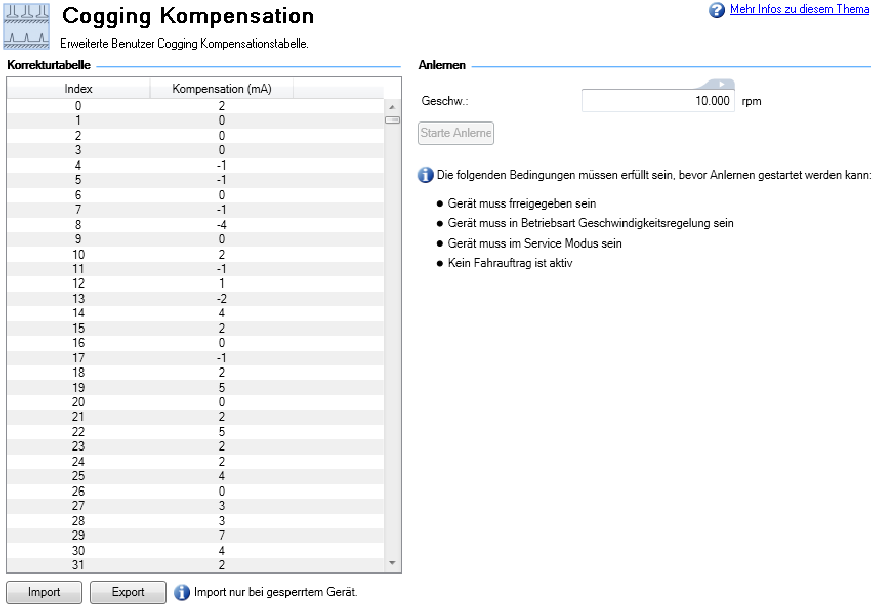
Die Kompensationstabelle wird links angezeigt. Unten sind Schaltflächen zum Import und Export der Tabelle von/zu einer CSV Datei. Import arbeitet nur bei gesperrtem Servoverstärker.
Die Steuerelemente für automatisches Anlernen der Kompensationstabelle werden rechts angezeigt.
Anlernen (Allgemein)
Die Schaltfläche Starte Anlernen oder der Befehl COGCOMP.TEACH können benutzt werden, um den Servoverstärker automatisch Cogging Effekte suchen zu lassen und eine Kompensationstabelle zu erzeugen.
Die folgenden Voraussetzungen müssen vor dem Start erfüllt sein:
- Der Servoverstärker muss freigegeben sein sowie im Service und Geschwindigkeits Modus.
- Bei einem nicht absoluten Feedback muss eine Referenzfahrt ausgeführt worden sein.
- Keine andere Bewegung darf aktiv sein.
Wenn der Anlernprozess mit der Schaltfläche auf der Bildschirmseite Cogging Kompensation gestartet wurde, wird die Tabelle in nicht-flüchtigen Speicher gespeichert und nach Aus- und Wiedereinschalten des Servoverstärkers wieder geladen. Anderenfalls kann die Tabelle manuell mit dem Befehl COGCOMP.SAVE gespeichert werden..
Sollte die Bewegung während des Anlernprozesses vom Benutzer oder vom Servoverstärker (z.B. durch einen Endschalter) gestoppt werden, wird der Anlernprozess abgebrochen, alle Werte werden auf Null gesetzt und eine Warnung wird ausgegeben.
Tuning:
Um das erforderliche Drehmoment zur Überwindung von Cogging-Effekten genau aufzuzeichnen, muss die Achse steif eingestellt werden, selbst wenn die Achse in der Produktion nicht mit einer hohen Bandbreite arbeiten wird. Da der Anlern-Algorithmus im Velocity-Modus läuft, stellen Sie sicher, dass der Velocity Integrator VL.KI hoch genug eingestellt ist, um eine hohe Steifigkeit während der Bewegung zu erreichen.
Nachdem das Teachen beendet ist und die Cogging-Kompensation erreicht ist, kann die Achse für den Produktionsbetrieb eingestellt werden.
Anlernen für rotatorische Motoren
- COGCOMP.V auf einen niedrigen Wert einstellen. Wenn der Verfahrweg kleiner als zwei Umdrehungen der Welle sein muss, kann der Bereich mit COGCOMP.RANGEHIGH und COGCOMP.RANGELOW begrenzt werden.
Geschwindigkeiten von ~ 1 U/min werden empfohlen. Je mehr Zeit der Servoverstärker hat, um einen perfekten Schleppfehler zu erzielen, eine desto bessere Qualität der Kompensationstabelle wird erreicht. - Wenn der Bereich begrenzt ist, muss der Motor zu einer Position unter dem Wert von COGCOMP.RANGELOW bewegt werden.
- Klicken Sie "Anlernen Starten" in WorkBench, oder COGCOMP.TEACH.
- Wenn alle Voraussetzungen erfüllt sind und der Anlernprozess gestartet wurde, wird der Motor entweder mit der definierten Geschwindigkeit etwa 2 Umdrehungen, oder den durch COGCOMP.RANGEHIGH und COGCOMP.RANGELOW begrenzten Bereich verfahren. Wenn die Cogging Kompensation vorher freigegeben war, wird sie automatisch gesperrt.
Anlernen für Linearmotoren
- Der lineare Bereich der Nachschlagetabelle muss mit COGCOMP.RANGELOW und COGCOMP.RANGEHIGH angegeben werden, die Cogging-Kompensationstabelle ist NUR aktiv, wenn sich der Motor innerhalb dieses Positionsbereichs befindet.
- COGCOMP.V auf einen niedrigen Wert einstellen
Geschwindigkeiten von ~ 1 mm/s werden empfohlen. Je mehr Zeit der Servoverstärker hat, um einen perfekten Schleppfehler zu erzielen, eine desto bessere Qualität der Kompensationstabelle wird erreicht. - Fahren Sie den Linearmotor in eine Position UNTER dem eingestellten Wert für COGCOMP.RANGELOW.
Wenn der Anlernvorgang beginnt, wird eine positive Bewegung angefordert. Um sicherzustellen, dass der gesamte Bereich abgebildet wird, muss der Motor mit dem Anlernen unter dem Start der Cogging-Tabelle beginnen. - Wenn alle Voraussetzungen erfüllt sind und der Anlernprozess gestartet wurde, wird der Motor mit der definierten Geschwindigkeit über den gesamten Bereich zwischen COGCOMP.RANGELOW und COGCOMP.RANGEHIGH verfahren. Wenn die Cogging Kompensation vorher freigegeben war, wird sie automatisch gesperrt.
-
- Die Kompensationswerte sind verknüpft mit der Positionsrückführung des Antriebs. Hinzufügen oder Entfernen von Offsets, Referenzfahrten zu anderen Positionen, Ändern der Cogging Kompensationsbereiches oder andere Beeinflussungen der Positionsrückführung führen zu Abweichungen zwischen Kompensationswerten und vorhandenem Cogging im Motor und führen daher zu unerwarteten Bewegungen.
Validieren der Cogging Kompensation
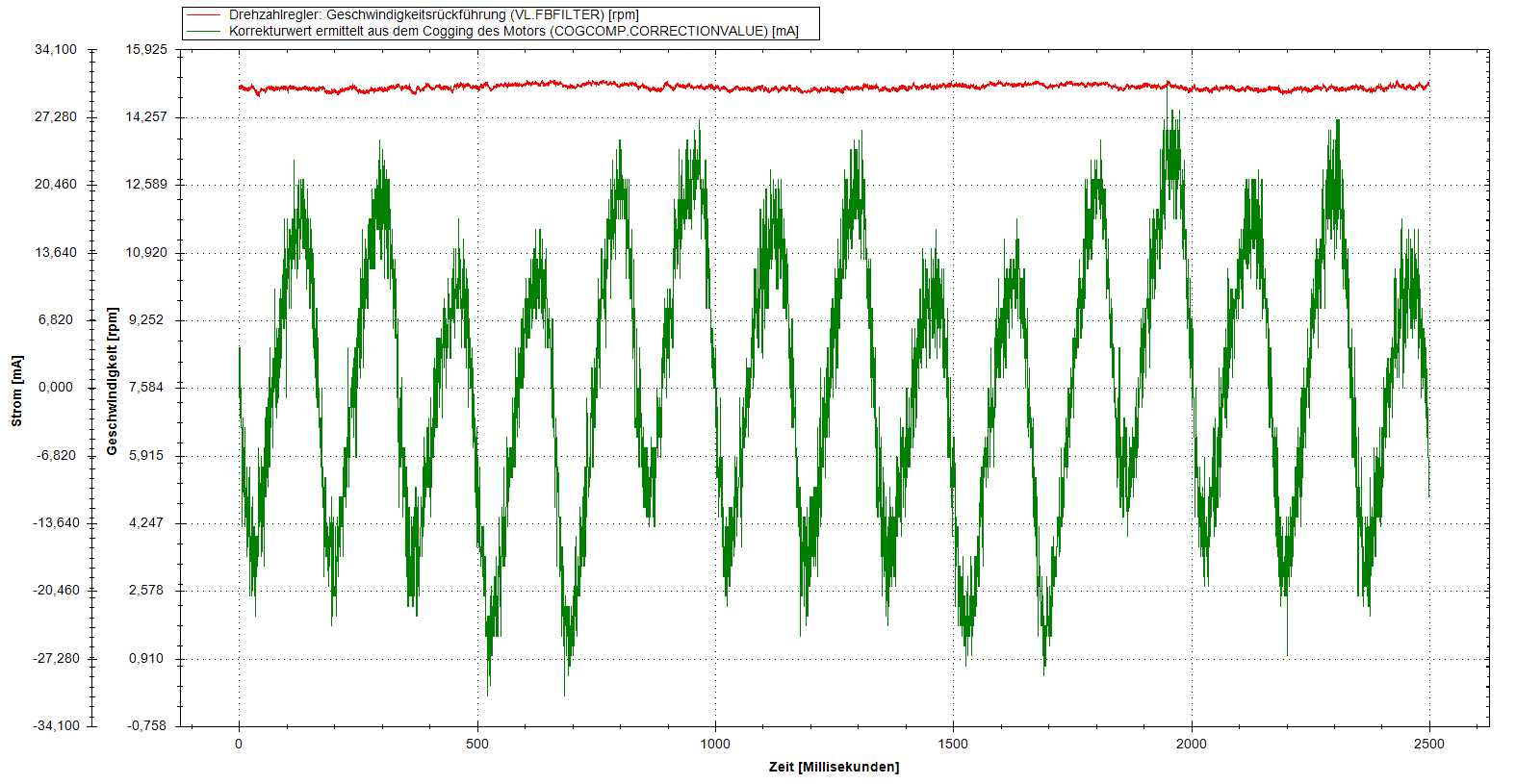
Die Wirkung der Cogging Kompensation, COGCOMP.CORRECTIONVALUE kann im Oszilloskop zur Validierung aufgezeichnet werden. Gezeigt wird der Vorsteuerwert, der aktuell zur Cogging Kompensation beaufschlagt wird.
Die folgenden Bilder zeigen die Wirkung auf die Geschwindigkeit in zwei Aufnahmen, die erste ohne Kompensation und die zweite mit freigegebener Kompensation, wobei COGCOMP.CORRECTIONVALUE zusätzlich zur Geschwindigkeit angezeigt wird. Bei beiden Aufnahmen wurde derselbe Motor mit denselben Einstellungen bei derselben konstanten Bewegung mit 15 U/min verwendet. Die Kompensationstabelle wurde automatisch erzeugt mit automatischem Anlernen.
Cogging Kompensation gesperrt:
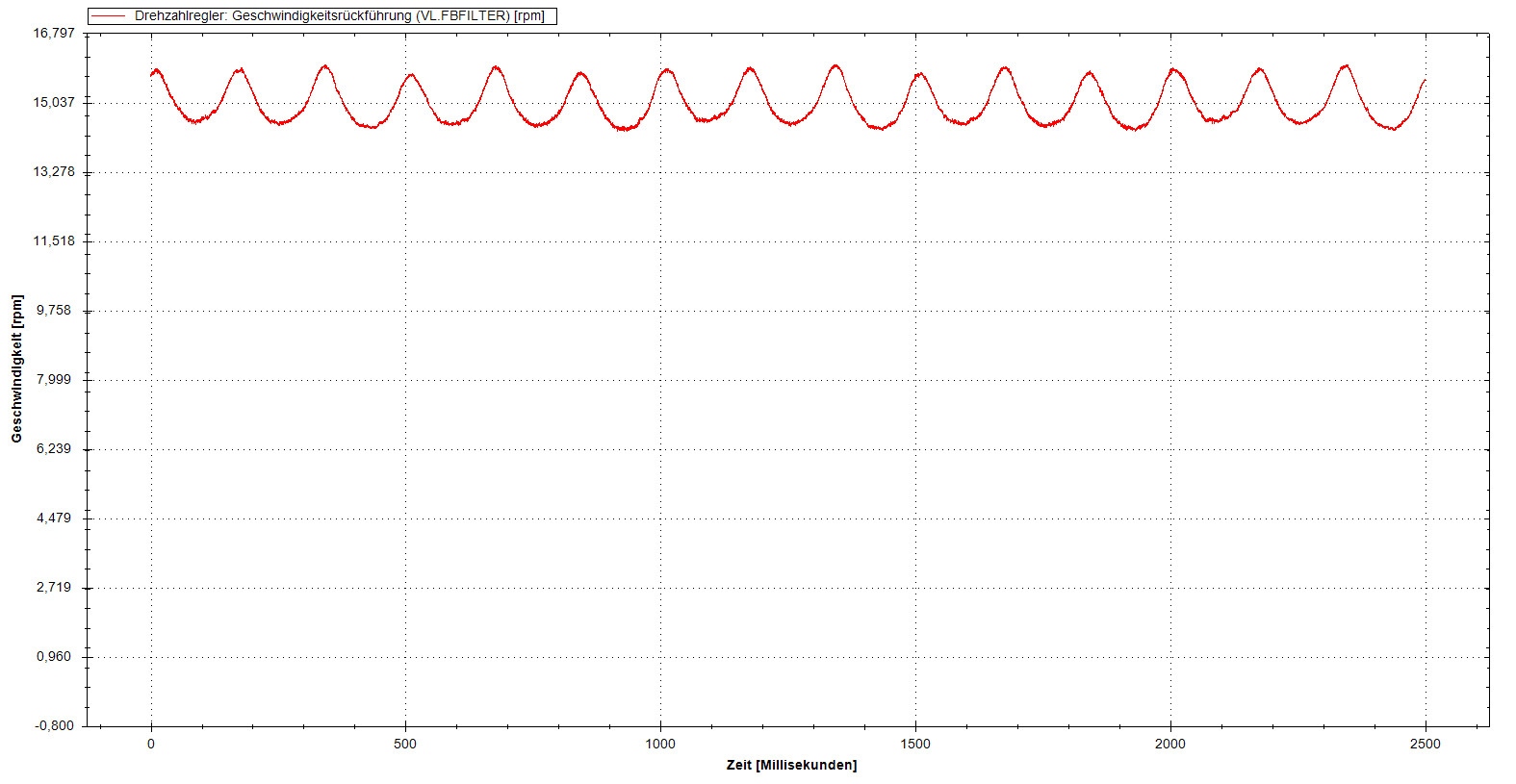
Cogging Kompensation freigegeben: